In this picture you see a proof-of-concept setup with the ABB robotic arm on a mobile truck. This setup has now been built at Proeftuin Randwijk and will allow the project team to conduct year-round experiments under defined conditions. The robot can also be easily driven outside for experiments in the orchard.
The setup was demonstrated during an online webinar organized by NFO on precision applications.
Click here to see a video of this webinar.
Additionally, this work package focuses on two topics on which we will give you an update.


Development of a sensor system and picker for harvesting pears
Using the photographic images collected in the orchard last year, a deep-learning image analysis algorithm was developed that can detect the location of pears on the tree with high reliability. Because a correct picking movement (picking the pear without damaging the stalk) not only depends on the position of the fruit but also on its orientation, the deep-learning algorithm is currently being extended with a so-called 3D key-point detection. WUR is working closely with Munckhof on the design of the picker. This is because Munckhof has already made significant inroads over the past two years in a parallel project involving the development of a vacuum-based apple picker.
The project team will use the components developed here as much as possible ob e pear picker. How a force sensor might be added ob e picker is also being investigated. This will enable the picker and the robot ob e able to make the correct picking movement.
Red currant pruning
During the pruning season, WUR employees visited several growers and discussed their wishes and requirements regarding the automatic pruning of red currant bushes. Trials were also conducted with various 2D and 3D cameras and LIDAR sensors to map the structure of the plants. Choosing an affordable sensor system is proving to be quite challenging.
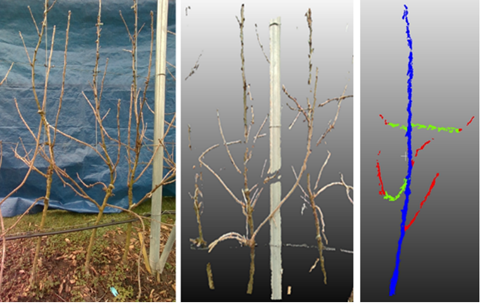
An extensive dataset of over 100 plants in the orchard was collected during the winter period.
The team is currently investigating the extent to which a 3D deep-learning algorithm can distinguish 1-year-old and 2-year-old shoots based on color and position information. Regarding the development of automatic pruning shears for the robot, the components of a set of commercial battery-powered pruning shears were placed in a newly designed and 3D-printed housing. The electronics have been adapted and expanded so that the pruning shears can be attached to a robotic arm and controlled by software. The first trials with the robot are scheduled to take place soon.
Article by: Jochen Hemming






